ROS Basics in 5 days (C++) 4.4 Topics Quiz Not subscribed to
Por um escritor misterioso
Descrição
I don’t understand what I am doing wrong. The robot avoids an obstacle. The node name is correct (“topics_quiz_node”). No other programs are running. #include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <sensor_msgs/LaserScan.h> float angVel = 0; void laserCallback(const sensor_msgs::LaserScan::ConstPtr& laserScan) { angVel = 0.0; ROS_INFO("Forward: %f", laserScan->ranges[360]); ROS_INFO("Left: %f", laserScan->ranges[719]); ROS_INFO("Right: %f", laserScan->ranges[719]);

ROS FOR BEGINNERS: ROS Basics In 5 Days (C++)

Adenylation Domain-Guided Recruitment of Trans-Acting Nonheme Monooxygenases in Nonribosomal Peptide Biosynthesis

Quiz - unit 4 - c++ - ROS Basics In 5 Days (C++) - The Construct ROS Community

Deciphering the Substrate Specificity of SbnA, the Enzyme Catalyzing the First Step in Staphyloferrin B Biosynthesis

ROS BASICS IN 5 DAYS #2 - Learn ROS Without Installation & Programming Turtlebot
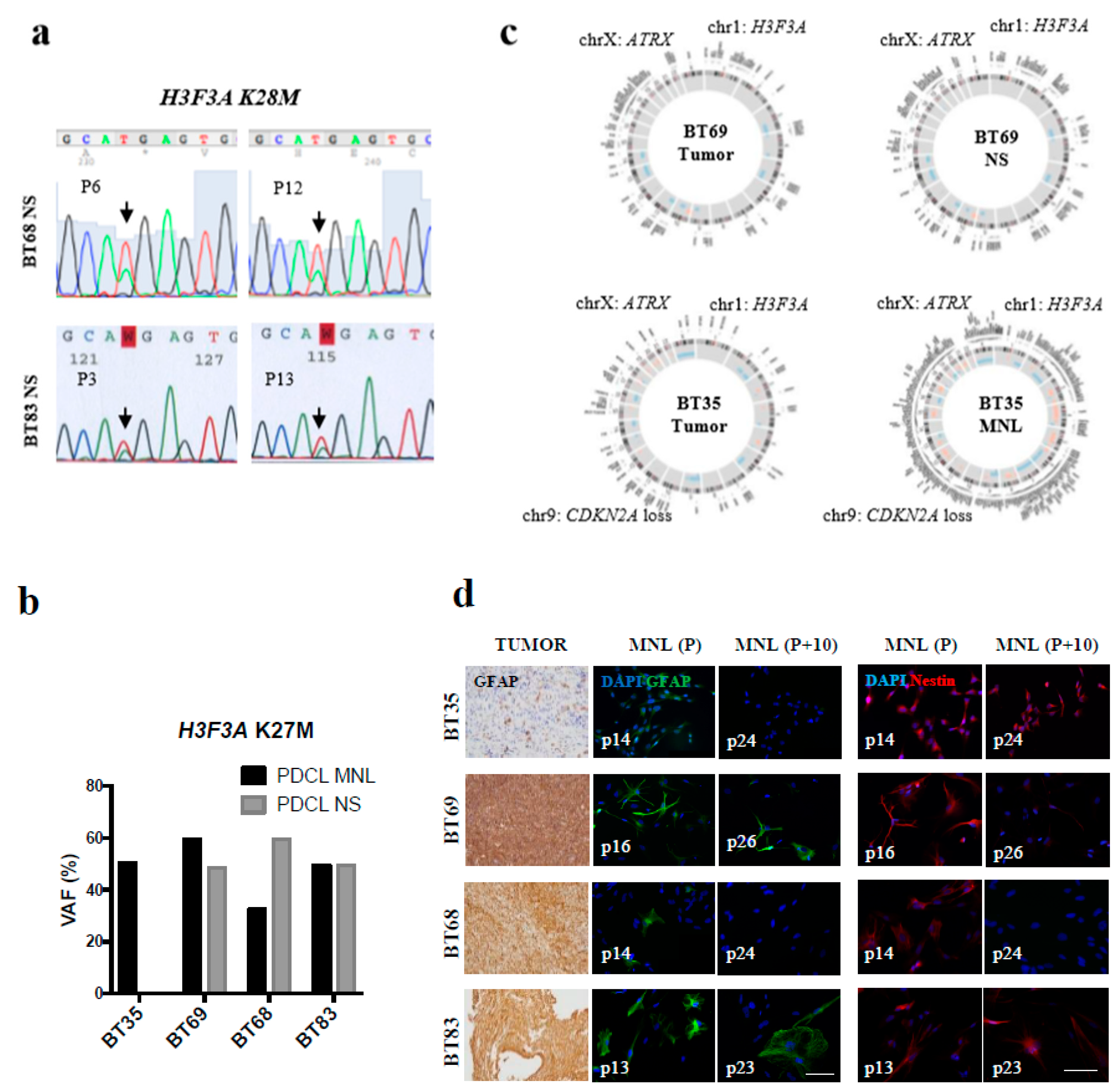
Cancers, Free Full-Text

Robot 2017: Third Iberian Robotics Conference: Volume 2 9783319708355, 9783319708362, 331970835X, 3319708368

Intelligent Robot: Implementation and Applications 981198252X, 9789811982521

Laboratoire de Recherche en Informatique 2005-2008 report - LRI

Inside the IBM RISC System/ PDF Free Download
de
por adulto (o preço varia de acordo com o tamanho do grupo)